Guanqi He
Carnegie Mellon University, Robotics Institute, Master of Science in Robotics.

I am a second year master student in Robotics Institution at Carnegie Mellon University. I am currently working at LeCAR Lab and Air Lab, co-advised by Prof. Guanya Shi and Prof. Sebastian Scherer. Previously I worked with Prof. Yang Wang at MAgIC Lab at ShanghaiTech University.
My work focuses on designing algorithms to help robots handle environmental disturbances and model uncertainty. I aim to enpower robotic systems to dynamically adapt environment changes in real-time and learn continuously in real-world scenarios, utilizing methodologies from both the learning and control communities.
News
- 2026-06-15: TopoRetarget is released for interaction-preserving retargeting in dexterous manipulation.
- 2026-06-09: OMG receives an Oral at ExWBC @ RSS 2026 and a Spotlight at RoboData @ RSS 2026.
- 2025-05-30: Hold My Beer is released and accepted to CoRL 2025.
- 2025-05-20: Sampling-Based System Identification with Active Exploration is released and accepted to CoRL 2025.
- 2025-04-14: Flying Hand is released and accepted to RSS 2025.
- 2025-02-03: ASAP is released and accepted to RSS 2025.
- 2024-10-10: Self-Supervised Meta-Learning for All-Layer DNN-Based Adaptive Control is released and presented at ICRA 2025.
- 2024-07-19: ABS is the Outstanding Student Paper Award Finalist at RSS 2024.
- 2024-07-08: Flying Calligrapher is released and published in RA-L 2024.
- 2024-03-11: Aerial Interaction with Tactile Sensing accepted by ICRA
Publications
-
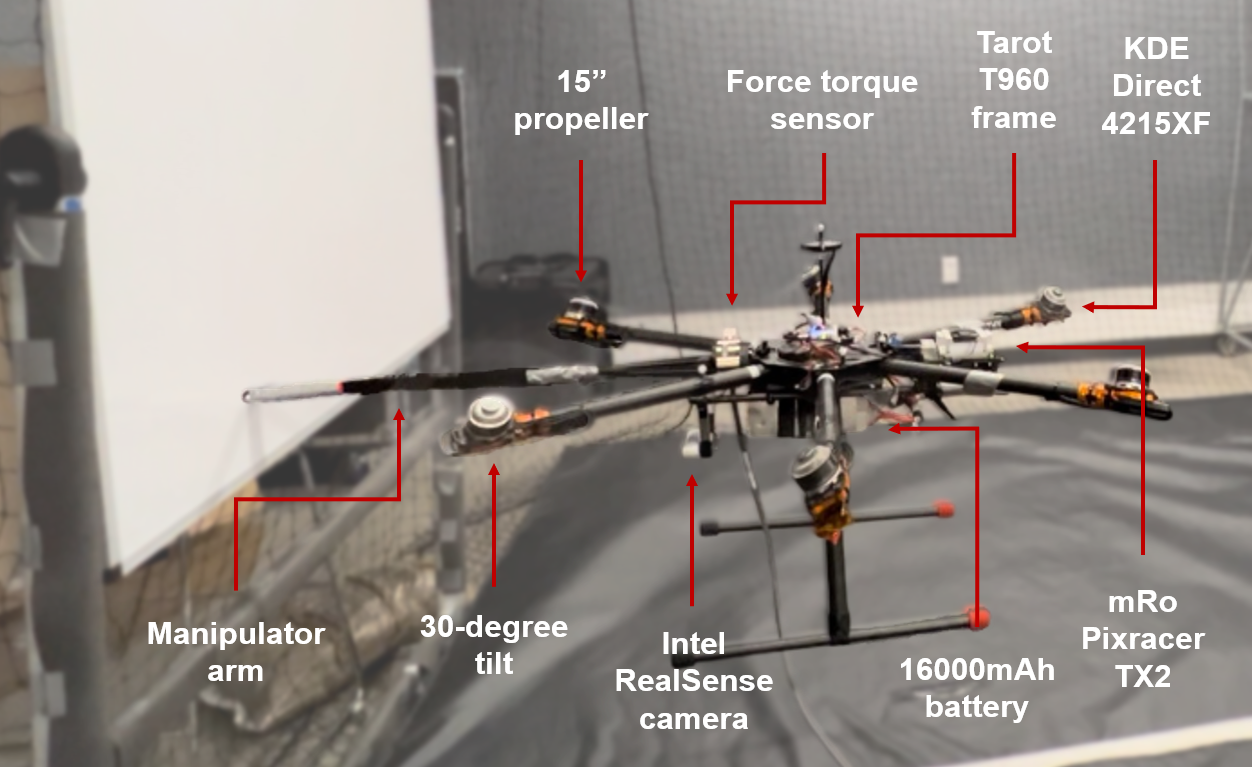 Image-based visual servo control for aerial manipulation using a fully-actuated uavIn IROS , 2023
Image-based visual servo control for aerial manipulation using a fully-actuated uavIn IROS , 2023 -
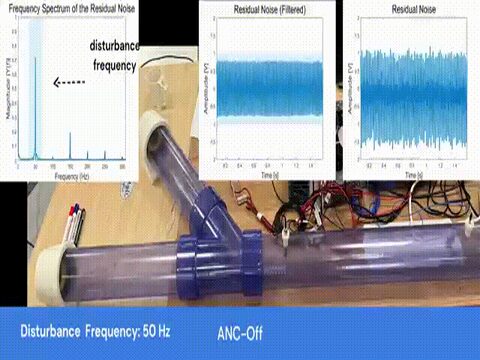 Switching-based Adaptive Output Regulation for Uncertain Systems Affected by a Periodic DisturbanceIn ACC , 2022
Switching-based Adaptive Output Regulation for Uncertain Systems Affected by a Periodic DisturbanceIn ACC , 2022












